BG Smoothing - What It Is and Why It Matters
In this post I explain what BG smoothing and sensor “noise” are, and why they matter for hybrid closed‑loop systems.
Disclaimer: I’m not a medical professional. This content is for informational purposes only and should not be taken as medical advice. If you are unsure about anything, consult a qualified healthcare professional.
So, what is smoothing?
To understand smoothing, we first need to understand sensor “noise”.
In Continuous Glucose Monitors (CGMs), “noise” refers to random fluctuations in the BG readings that don’t reflect the true glucose level in the body. Why is it there, you ask? It is there because the CGM is an electronic device that measures the resistance of the interstitial fluid (fluid between the cells). So for example, changes in the composition of that fluid (other than glucose) can affect the measured value. But also changes in temperature or external pressure (looking at you compression lows!) can influence the reading. So noise is an unwanted deviation of the measurement compared to the true value.
Not so bad, until..
In most cases this is not such a big problem, but look at the hypothetical scenario below, when it lines up in just the wrong way:
– choose your unit of choice
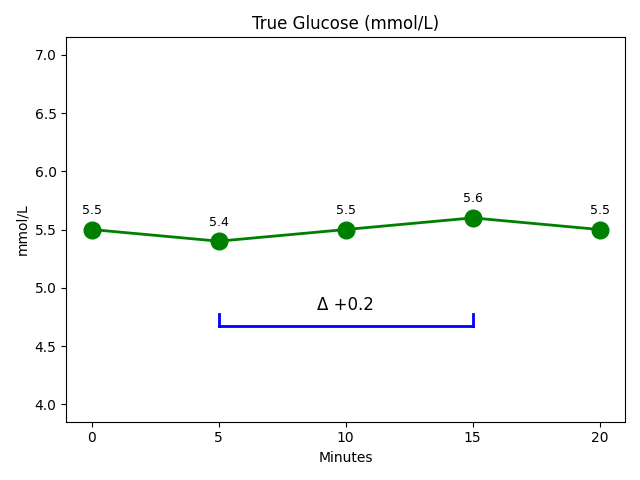
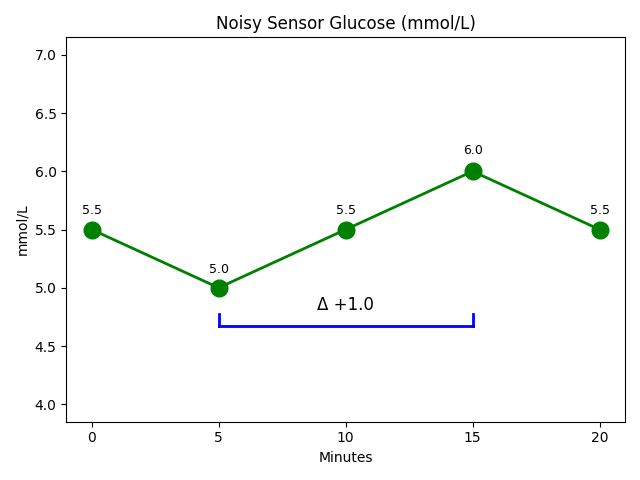
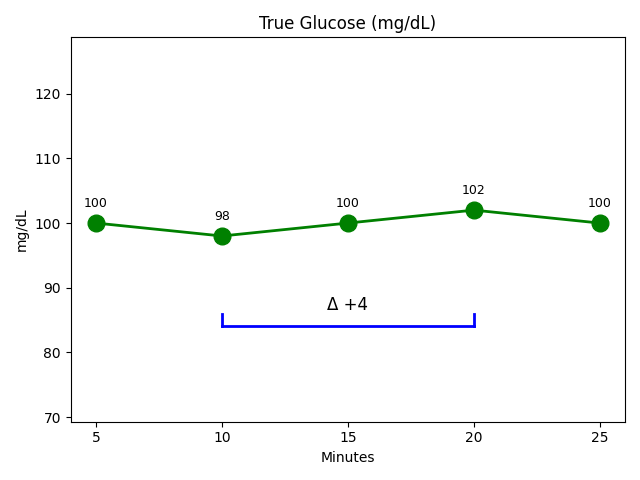
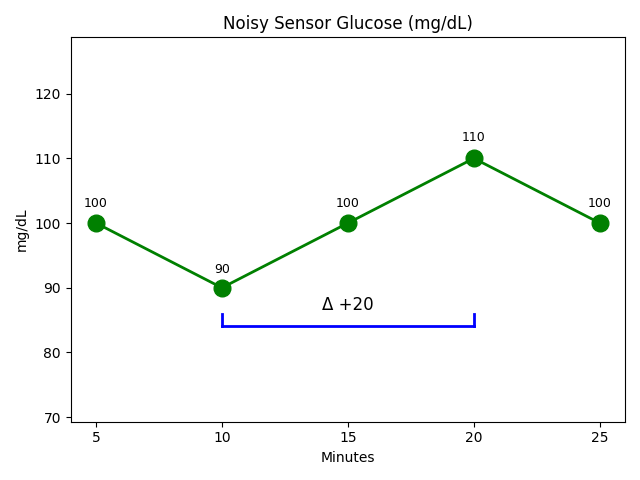
On the left we see the ‘true’ glucose. Normally we don’t know this but it is displayed for this example. On the right are the readings the sensor is giving us. The average of both graphs is the same, but the values that make up the average are not. They differ in such a way, that for the duration of two readings, it looks like you are at the start of a pretty steep BG spike. The loop can already have given 2 corrections before it figures out from the next value that it was a false alarm. This can potentially lead to dangerous hypos, as shown below:
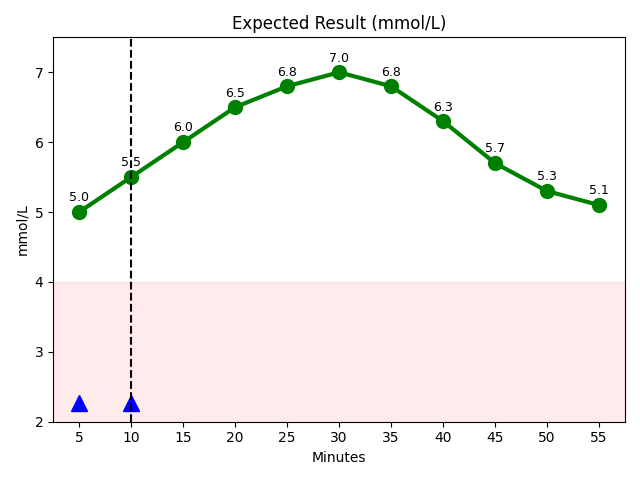
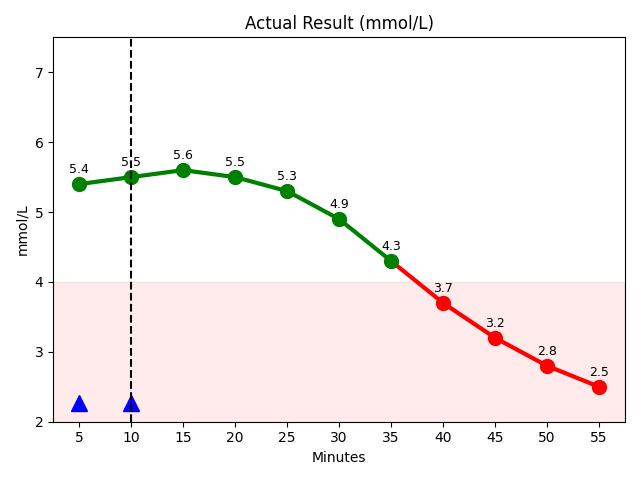
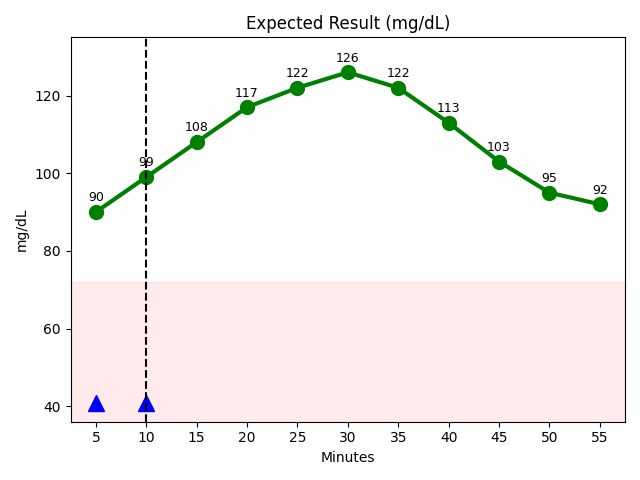
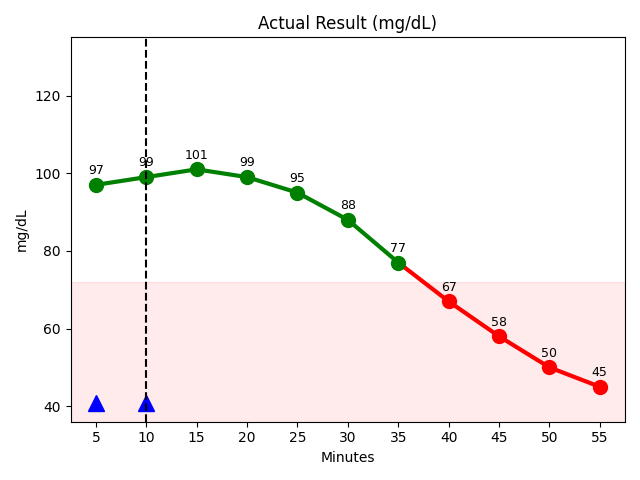
The left shows what the loop thinks will happen at minute 10 (dashed line) right up to minute 15 when it gets the new reading. On the right we see what actually happens. The loop thought there was an aggressive rise and dosed accordingly. We are now heading into a hypo.
Smoothing to the rescue
This is where smoothing comes into play. Smoothing is a way to remedy variability in readings by using an average delta. Instead of only looking at the difference between the last two readings, it looks at the average of the last few (short average delta). This way, potential jitters can be filtered out. The downside to this is that it takes longer for the loop to react to a rise or fall when they are actually happening. Because it takes a couple of readings to make the short average delta change enough for the loop to respond accordingly. The loop only reacts to changes that are actually happening but it takes longer to do so.
Another side effect is that some systems retroactively change the last reading when a new one comes in, because the average slightly changed under the hood. I had a couple of instances where I could swear I had seen a different value just then, but was apparently seeing things.
To conclude
So, while smoothing is necessary to compensate for noisy sensors, it can slightly decrease the responsiveness of a loop working with those readings. There are different sensors and some have their own smoothing, such as the Dexcom G6, whereas the Dexcom G7 and Freestyle Libre have a bit of a noisier reputation. To see whether it is recommended for your sensor and loop combination to use smoothing, you should look in their respective documentation.